Тема 1.2. Пара сил и момент силы относительно точки. Плоская система произвольно расположенных сил.
3. Приведение плоской системы произвольно расположенных сил к данному центру. Главный вектор и главный момент системы сил и их свойства.
Приведение системы сил к точке.
Пусть дана система сил F1, F2, F3, F4, расположенных как угодно на плоскости (рис. 14). Требуется сложить эти силы.
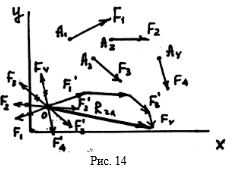
Рис. 14
Возьмем произвольную точку О и приведем все данные силы к этой точке, воспользовавшись способом приведения силы к точке. В результате приведения получим силы, эквивалентные заданным (на чертеже они отмечены двумя черточками) и присоединенные пары (F1, F1’), (F2, F2’), (F3, F3’), (F4, F4’), моменты которых равны моментам данных сил относительно точки О, т.е. М1 = М0(F1), М2 = М0(F2), М3 = М0(F3), М4 = М0(F4).
Складывая силы F1’, F2’, F3’, F4’, получим результирующую силу Rгл:
Rгл = F1’ + F2’ + F3’ + F4’
Складывая пары (F1, F1’), (F2, F2’), (F3, F3’), (F4, F4’), получим результирующую пару, момент которой Мгл равен:
Мгл = М1 + М2 + М3 + М4, т.е. Мгл = SМ0(Fi) – момент результирующей пары равен алгебраической сумме моментов данных сил относительно точки О.
Rгл – главный вектор
Мгл – главный момент, следовательно: система сил, расположенных как угодно на плоскости, всегда может быть приведена к силе, равной их главному вектору и к паре, момент которой равен главному моменту данных сил относительно точки приведения.