Тема 1.3. Пространственная система сил
| Сайт: | Образовательный портал ФГБОУ ВО «МГТУ им. Г.И. Носова» |
| Курс: | Техническая механика |
| Книга: | Тема 1.3. Пространственная система сил |
| Напечатано:: | Гость |
| Дата: | воскресенье, 5 июля 2026, 12:55 |
1. Разложение силы по трем осям координат
Приведение силы к точке
Пусть дана сила F, приложенная к точке А твердого тела, и ее требуется перенести в точку О (рис. 13а).
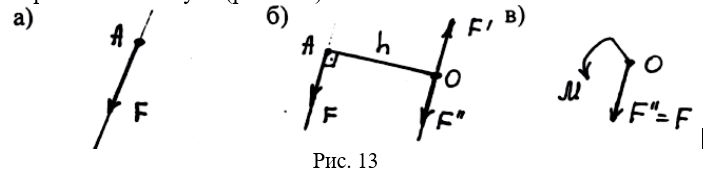
Приложим к телу в точке О (рис. 13, б) уравновешенную систему сил F’ и F”, параллельных F и равных ей по модулю. Теперь кроме силы F”, приложенной в точке О, образовалась пара сил (F, F’) с моментом М = F * h, т.е. М = М0(F). Таким образом, всякую силу F, приложенную к телу в точке А, присоединив пару сил, момент которой равен моменту данной силы относительно новой точки ее приложения, можно перенести параллельно линии действия в любую точку О.
Операция такого переноса силы называется приведением силы к точке, а появляющаяся при этом пара (F, F’) с моментом М = М0(F) называется присоединенной парой (рис. 13, в). Операция приведения силы к точке имеет глубокий физический смысл.
Приведение системы сил к точке.
Пусть дана система сил F1, F2, F3, F4, расположенных как угодно на плоскости (рис. 14). Требуется сложить эти силы.
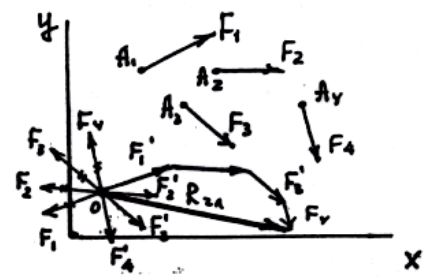
Рис. 14
Возьмем произвольную точку О и приведем все данные силы к этой точке, воспользовавшись способом приведения силы к точке. В результате приведения получим силы, эквивалентные заданным (на чертеже они отмечены двумя черточками) и присоединенные пары (F1, F1’), (F2, F2’), (F3, F3’), (F4, F4’), моменты которых равны моментам данных сил относительно точки О, т.е. М1 = М0(F1), М2 = М0(F2), М3 = М0(F3), М4 = М0(F4).
Складывая силы F1’, F2’, F3’, F4’, получим результирующую силу Rгл:
Rгл = F1’ + F2’ + F3’ + F4’
Складывая пары (F1, F1’), (F2, F2’), (F3, F3’), (F4, F4’), получим результирующую пару, момент которой Мгл равен:
Мгл = М1 + М2 + М3 + М4, т.е. Мгл = SМ0(Fi) – момент результирующей пары равен алгебраической сумме моментов данных сил относительно точки О.
Rгл – главный вектор
Мгл – главный момент, следовательно: система сил, расположенных как угодно на плоскости, всегда может быть приведена к силе, равной их главному вектору и к паре, момент которой равен главному моменту данных сил относительно точки приведения.
2. Равновесие системы. Три виды уравнения равновесия.
Условие равновесия плоской системы произвольно
расположенных сил
Необходимые и достаточное условие равновесия плоской системы сил состоит в том, чтобы главный вектор этой системы и ее главный момент были равны нулю.
Rгл = 0, Мгл = 0
При решении задач статики задаются нагрузками, а по ним определяют реакции опор. Сами задачи решаются с применением алгебраических методов с помощью систем уравнений, которые получают из условия равновесия.
Уравнения равновесия и их различные формы
Рассмотрим три формы уравнений равновесия для произвольной плоской системы сил.
1. Первая форма уравнений равновесия вытекает непосредственно из условия равновесия плоской системы сил:
SFх = 0; SFу = 0; SМ0(Fi) = 0.
т.е. если плоская система сил уравновешена, то алгебраические суммы проекций всех сил на оси х и у равны нулю, а также равна нулю алгебраическая сумма моментов всех ил относительно любой точки.
2. Вторая форма уравнений равновесия получается, если вместо одного уравнения моментов составить два и к ним добавить одно уравнение проекций, кроме той, которая перпендикулярна прямой, проходящей через центры моментов в первых двух уравнениях, т.е.
SМА(Fi) = 0; SМВ(Fi) = 0; SFх = 0.
3. Третья форма уравнений равновесия получается, если вместо уравнения проекций к двум уравнениям моментов относительно двух произвольно взятых точек А и В добавить третье уравнение моментов сил относительно какой-либо точки С, не лежащей на прямой АВ, т.е.
SМА(Fi) = 0; SМВ(Fi) = 0; SМС(Fi) = 0
Пространственная система сил. Условие равновесия
Система сил, линии действия которых расположены как угодно в пространстве, называется пространственной.
Силы F1, F2, F3 образуют простейшую пространственную систему сил (рис. 15).

Рис. 15
SF – равнодействующая, равна диагонали параллелепипеда, ребра которого равны и параллельны заданным силам.
Определить величину этой равнодействующей можно методом проекций.
Если SF = 0, то сходящаяся система сил уравновешена, тогда должны быть равны нулю каждая из трех проекций равнодействующей на оси х, у, z (рис. 16).

Рис. 16
Таким образом, аналитическое условие равновесия пространственной системы сил выражается тремя уравнениями:
SFх = 0; SFу = 0; SFz = 0
Зная уравнения равновесия систем сил можно решать задачи статики по определению реакций опор, опираясь на правила и выводы, сформулированные в УЭ №1, 2, 3, 4.
3. Связи и их реакции.


4. Пример выполнения практической работы №3
Практическая работа № 5
Определение опорных реакций
Цель: формирование умений определять опорные реакции в балках или в рамных конструкциях, используя условия равновесия системы сходящихся или произвольно расположенных сил.
Задание:
Определите опорные реакции балок двухопорной или жестко защемленный.
а) двухопорная балка (рис. 17, а); б) расчетная схема двухпорной балки
 Рис. 17
Рис. 17
Решение
1. Обозначьте шарнирно-неподвижную опору А, шарнирно-подвижную В.
2. Освободитесь от связей, заменив их действие реакциями связей YА; НА;YB (рис. 17, б).
3. Замените распределенную нагрузку q сосредоточенной силы Q.
Q = q · l = 10 · 3 = 30кн
4. Выполните расчетную схему, показав на ней все силы, действующие на балку (рис. 7б).
5. Выберите форму записи уравнений равновесия плоской системы произвольно расположенных сил.
Для двухопорной балки 2-я форма записи уравнений равновесия.

Если это равенство не удовлетворяется, то при определении опорных реакций была допущена ошибка.
б) консольная балка.
Балка с защемленной опорой называется консолью. Защемляющая неподвижная опора лишает балку всех трех степеней свободы, соответственно в защемлении появляются три неизвестные реакции: YA; НА; МА (рис.18, а, б).

Рис. 18
Распределенную нагрузку интенсивностью q замените на сосредоточенную силу Q:

Реакции вычислены правильно.
Варианты заданий к практической работе №3 даны в приложении 3. Выполните свой вариант задания.