Тема 1.2. Пара сил и момент силы относительно точки. Плоская система произвольно расположенных сил.
| Сайт: | Образовательный портал ФГБОУ ВО «МГТУ им. Г.И. Носова» |
| Курс: | Техническая механика |
| Книга: | Тема 1.2. Пара сил и момент силы относительно точки. Плоская система произвольно расположенных сил. |
| Напечатано:: | Гость |
| Дата: | суббота, 18 октября 2025, 04:28 |
Оглавление
- 1. Пара сил. Момент пары. Момент силы относительно точки.
- 2. Приведение силы к данной точке.
- 3. Приведение плоской системы произвольно расположенных сил к данному центру. Главный вектор и главный момент системы сил и их свойства.
- 4. Уравнения равновесия и их различные формы
- 5. Пример выполнения практической работы №2
1. Пара сил. Момент пары. Момент силы относительно точки.
- Знать обозначение, модуль и определение моментов пары сил и силы относительно точки, условия равновесия системы пар сил.
- Уметь определять моменты пар сил и момент силы относительно точки, определять момент результирующей пары сил.
Две равные и параллельные силы, направленные в противоположные стороны и не лежащие на одной прямой, называются парой сил. Примером такой системы сил могут служить силы, передаваемы руками шофера на рулевой колесо автомобиля.
Действие пары сил на твердое тело, как показывает опыт, состоит в том, что она стремиться вращать это тело. Рассмотрим гайку, которую затягивают гаечным ключом определенной длины, прикладывая к концу ключа мускульное усилие. Если взять гаечный ключ длиннее, то, прилагая то же усилие, гайку можно затянуть значительно сильнее. Из этого следует, что одна и та же сила может оказывать различное вращательное действие. Вращательное движение характеризуется моментом силы.
Действие пары на твердое тело характеризуется вращательным эффектом, зависящим от:
- модуля сил пары F и длины ее плеча h;
- направление вращения пары в плоскости ее действия (это плоскость, на которой лежат линии действия сил, составляющих пару).
Моментом силы относительно точки называется произведение модуля силы на кротчайшее расстояние (взятое по перпендикуляру к силам), называемым плечом силы.
Силы, входящие в пару, не уравновешиваются, т.к. они приложены к двум точкам (рис.1.20). Их действие на тело не может быть заменено одной силой (равнодействующей).
Кратчайшее расстояние между линиями действия сил называется плечом пары.
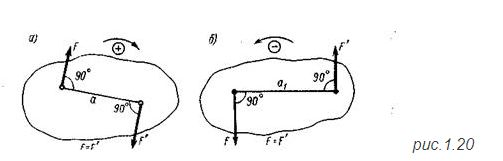
Момент силы пары сил считается положительным, если пара стремиться повернуть тело по направлению хода часовой стрелки (рис. 1.20 а), и отрицательным, если пара сил стремиться вращать тело против часовой стрелки (рис. 1.20 б).
Единица момента силы: [M] = [F]*[h] =ньютон * метр = Н*м
Момент силы относительно точки равен нулю, если линия действия проходит через точку, т.к. в этом случае расстояние до силы равно нулю.
Между моментом пары и моментом силы есть одно существенное различие. Численной значение и направление момента пары сил не зависят от положения этой пары в плоскости. Значение и направление (знак) момент силы зависит от положения точки, относительно которой определяется момент.
Две пары сил считаются эквивалентными в том случае, если после замены одной пары другой парой механическое состояние тела не изменяется, т. е. не изменяется движение тела или не нарушается его равновесие.
Эффект действия пары сил на твердое тело не зависит от ее положения в плоскости. Таким образом, пару сил можно переносить в плоскости ее действия в любое положение.
Рассмотрим еще одно свойство пары сил, которое является основой для сложения пар.
Не нарушая состояния тела, можно как угодно изменять модули сил и плечо пары, только бы момент пары оставался неизменным.
Заменим пару сил с плечом a (рис.1.21а) новой парой плечом b (рис. 1.21,6) так, чтобы момент пары оставался тем же. Момент заданной пары сил М1 = F1a. Момент новой пары сил М2 = F2b. По определению пары сил эквивалентны, т. е. производят одинаковое действие, если их моменты равны.
Если изменив значения сил и плечо новой пары, мы сохраним равенство их моментов Мг = Мг или F1a = F2b, то состояние тела от такой замены не нарушится.
Итак, вместо заданной пары с плечом а мы получили эквивалентную пару с плечом b.
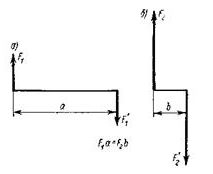
рис.1.21
2. Приведение силы к данной точке.
Приведение силы к точке
Пусть дана сила F, приложенная к точке А твердого тела, и ее требуется перенести в точку О (рис. 13а).

Рис. 13
Приложим к телу в точке О (рис. 13, б) уравновешенную систему сил F’ и F”, параллельных F и равных ей по модулю. Теперь кроме силы F”, приложенной в точке О, образовалась пара сил (F, F’) с моментом М = F * h, т.е. М = М0(F). Таким образом, всякую силу F, приложенную к телу в точке А, присоединив пару сил, момент которой равен моменту данной силы относительно новой точки ее приложения, можно перенести параллельно линии действия в любую точку О.
Операция такого переноса силы называется приведением силы к точке, а появляющаяся при этом пара (F, F’) с моментом М = М0(F) называется присоединенной парой (рис. 13, в). Операция
3. Приведение плоской системы произвольно расположенных сил к данному центру. Главный вектор и главный момент системы сил и их свойства.
Приведение системы сил к точке.
Пусть дана система сил F1, F2, F3, F4, расположенных как угодно на плоскости (рис. 14). Требуется сложить эти силы.
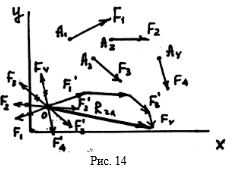
Рис. 14
Возьмем произвольную точку О и приведем все данные силы к этой точке, воспользовавшись способом приведения силы к точке. В результате приведения получим силы, эквивалентные заданным (на чертеже они отмечены двумя черточками) и присоединенные пары (F1, F1’), (F2, F2’), (F3, F3’), (F4, F4’), моменты которых равны моментам данных сил относительно точки О, т.е. М1 = М0(F1), М2 = М0(F2), М3 = М0(F3), М4 = М0(F4).
Складывая силы F1’, F2’, F3’, F4’, получим результирующую силу Rгл:
Rгл = F1’ + F2’ + F3’ + F4’
Складывая пары (F1, F1’), (F2, F2’), (F3, F3’), (F4, F4’), получим результирующую пару, момент которой Мгл равен:
Мгл = М1 + М2 + М3 + М4, т.е. Мгл = SМ0(Fi) – момент результирующей пары равен алгебраической сумме моментов данных сил относительно точки О.
Rгл – главный вектор
Мгл – главный момент, следовательно: система сил, расположенных как угодно на плоскости, всегда может быть приведена к силе, равной их главному вектору и к паре, момент которой равен главному моменту данных сил относительно точки приведения.
4. Уравнения равновесия и их различные формы
Рассмотрим три формы уравнений равновесия для произвольной плоской системы сил.
1. Первая форма уравнений равновесия вытекает непосредственно из условия равновесия плоской системы сил:
SFх = 0; SFу = 0; SМ0(Fi) = 0.
т.е. если плоская система сил уравновешена, то алгебраические суммы проекций всех сил на оси х и у равны нулю, а также равна нулю алгебраическая сумма моментов всех ил относительно любой точки.
2. Вторая форма уравнений равновесия получается, если вместо одного уравнения моментов составить два и к ним добавить одно уравнение проекций, кроме той, которая перпендикулярна прямой, проходящей через центры моментов в первых двух уравнениях, т.е.
SМА(Fi) = 0; SМВ(Fi) = 0; SFх = 0.
3. Третья форма уравнений равновесия получается, если вместо уравнения проекций к двум уравнениям моментов относительно двух произвольно взятых точек А и В добавить третье уравнение моментов сил относительно какой-либо точки С, не лежащей на прямой АВ, т.е.
SМА(Fi) = 0; SМВ(Fi) = 0; SМС(Fi) = 0
Пространственная система сил. Условие равновесия
Система сил, линии действия которых расположены как угодно в пространстве, называется пространственной.
Силы F1, F2, F3 образуют простейшую пространственную систему сил (рис. 15).

Рис. 15
SF – равнодействующая, равна диагонали параллелепипеда, ребра которого равны и параллельны заданным силам.
Определить величину этой равнодействующей можно методом проекций.
Если SF = 0, то сходящаяся система сил уравновешена, тогда должны быть равны нулю каждая из трех проекций равнодействующей на оси х, у, z (рис. 16).

Рис. 16
Таким образом, аналитическое условие равновесия пространственной системы сил выражается тремя уравнениями:
SFх = 0; SFу = 0; SFz = 0
Зная уравнения равновесия систем сил можно решать задачи статики по определению реакций опор, опираясь на правила и выводы, сформулированные в УЭ №1, 2, 3, 4.
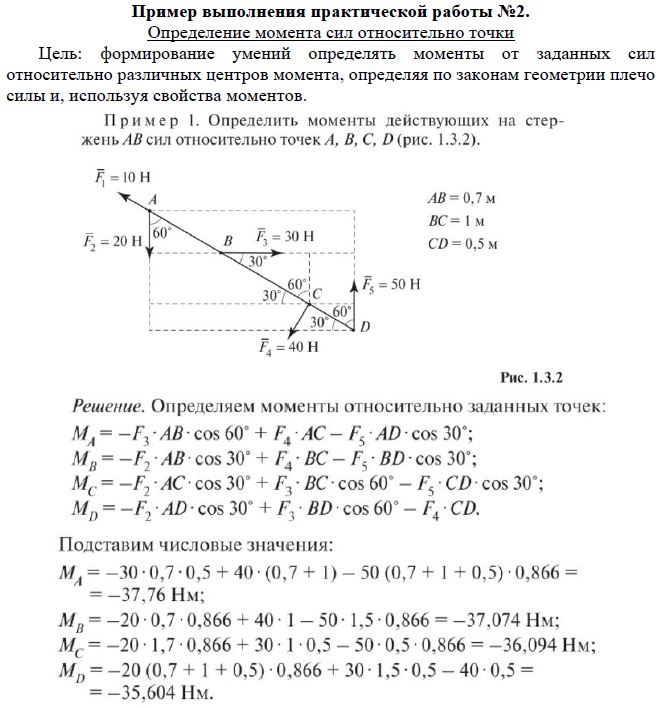
5. Пример выполнения практической работы №2