Тема 1.1. Статика. Основные понятия и аксиомы. Плоская система сходящихся сил.
| Сайт: | Образовательный портал ФГБОУ ВО «МГТУ им. Г.И. Носова» |
| Курс: | Техническая механика |
| Книга: | Тема 1.1. Статика. Основные понятия и аксиомы. Плоская система сходящихся сил. |
| Напечатано:: | Гость |
| Дата: | воскресенье, 5 июля 2026, 11:43 |
Оглавление
- 1. Материальная точка, абсолютно твердое тело.
- 2. Сила. Система сил.
- 3. Равнодействующая и уравновешивающая силы. Аксиомы статики.
- 4. Связи и их реакции.
- 5. Применение аксиом к решению задач
- 6. Доказательство следствия аксиом 2 и 3
- 7. Система сходящихся сил. Определение равнодействующей геометрическим способом. Геометрическое условие равновесия.
- 8. Пример выполнения практической работы №1
1. Материальная точка, абсолютно твердое тело.
Статика– это часть механики, которая изучает системы сил и условия равновесия материальных тел под действием сил.
Основные задачи в статике:
- Сложение сил и приведение системы сил к простейшему виду
- Определение условий системы сил, действующие на неподвижные тела.
- Абсолютно твердое тело – тело, в котором между двумя точками нет деформации.
- Материальная точка – тело, размерами которого пренебрегают.
Величина, которая количественной мерой механического взаимодействия материальных тел, называется в механике силой.
Сила характеризуется модулем, направлением и точкой приложения. Сила есть векторная величина.
Если под действием системы сил тело может находится в состоянии покоя, то такая система называется уравновешенной.
Две системы сил называются эквивалентными, если они оказывают одинаковое воздействие на твердое тело.
Если система сил, действующая на твердое тело, эквивалентна одной силе, то эта сила называется равнодействующей системы сил.
Различают внутренние и внешние силы. Силы взаимодействия между телами, входящими в систему для данной системы являются внутренними. Силы, действующие на тела, входящие в систему тел, со стороны тел, не входящих в систему, для данной системы называются внешними.
2. Сила. Система сил.
Сила – векторная величина, являющаяся мерой механического действия одного материального тела на другое. Всякая сила характеризуется величиной, направлением и точкой приложения. Сила – приложенный вектор.
Линия действия силы – прямая, проходящая через точку приложения силы и вдоль которой расположена сила.
Системой сил называется совокупность сил, приложенных к твердому телу. Обозначение:
Две параллельные силы, равные по величине, направленные в противоположные стороны, называются парой сил, или просто парой (рис. 1).

Две силы, равные по величине, направленные в противоположные стороны и имеющие общую линию действия, называются прямо противоположными
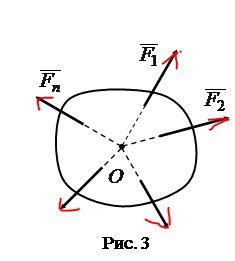
Система сил, линии действия которых пересекаются в одной точке, называется сходящейся системой сил (рис. 3).
Точка пересечения сил этой системы называется точкой схода.
Система сил, линии действия которых параллельны между собой, называется системой параллельных сил.
Кроме сходящихся и параллельных систем сил различают произвольные системы сил – это системы сил, линии действия которых расположены как угодно в пространстве (пространственная система сил) или на плоскости (плоская система сил).
3. Равнодействующая и уравновешивающая силы. Аксиомы статики.
Аксиомы статики – это основные законы и правила, которые применяют при преобразовании систем сил в эквивалентные системы. Такие преобразования не меняют уравнений движения абсолютно твердых тел. Поэтому они позволяют перейти от исходной системы сил к более простой, под действием которой механическая система будет совершать такое же движение, как и при действии на нее исходной системы. Аксиомы статики применяются не только при рассмотрении неподвижных состояний тел, но и во многих других задачах теоретической механики, связанными с силовыми воздействиями. Условием их применения является условие отсутствия деформаций в телах, или малость деформаций по сравнению с размерами механической системы. При таком приближении все тела рассматриваются как абсолютно твердые. В тех задачах, в которых тела нельзя считать абсолютно твердыми, например, при рассмотрении деформаций, аксиомы статики применять нельзя.
С точки зрения логики изложения материала, было бы естественным сначала изучить основы динамики материальных тел, а уже затем изучать статику в качестве одного из ее подразделов – как частный случай движения с нулевой скоростью. Однако, в силу особой важности и большого числа задач, в которых применяются законы статики, ее часто изучают в самом начале как особую дисциплину. При этом основные правила статики излагают в виде аксиом – то есть положений, принятых без доказательств. Часть аксиом действительно являются фундаментальными законами механики, установленными в результате обобщения экспериментальных данных (аксиомы 1 и 5). Остальные являются следствиями уравнений движения твердых тел.
1. Аксиома инерции (закон инерции Галилея)
Существуют такие системы отсчета, в которых любая материальная точка, не взаимодействующая с другими телами и точками, движется прямолинейно и равномерно. В частности, если тело покоилось в определенный момент времени, то оно будет покоиться и в последующие моменты.
Такие системы отсчета называются инерциальными. В механике, если это особо не оговорено, под системой отсчета подразумевается именно инерциальная система отсчета.
2. Аксиома равновесия двух сил
Две силы, приложенные к абсолютно твердому телу, являются уравновешенными тогда и только тогда, когда они равны по модулю, направлены в противоположные стороны и их линии действия совпадают.
3. Аксиома присоединения и исключения уравновешивающихся сил
Кинематическое состояние твердого тела не изменится, если к действующей на него системе сил прибавить или отнять уравновешенную систему сил.
То есть, прибавляя или исключая уравновешенную систему сил, мы получаем эквивалентную систему сил.
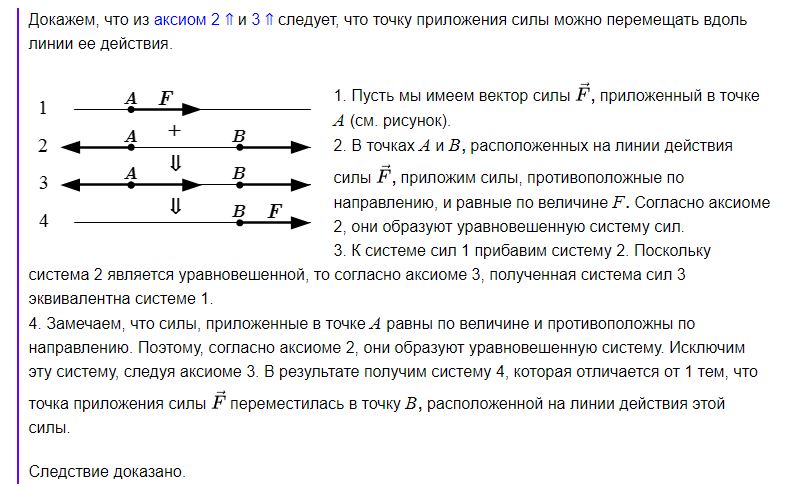
Следствие аксиом 2 и 3
Действие силы на твердое тело не изменится, если точку приложения силы перенести вдоль ее линии действия. То есть сила, приложенная к твердому телу, является скользящим вектором. Доказательство ⇓
4. Аксиома параллелограмма сил
Две силы, приложенные к телу в одной точке, можно заменить их равнодействующей силой, равной векторной сумме этих сил и приложенной к той же точке.
Верно и обратное. Любую силу можно разложить на две (и более) силы по правилу векторной суммы (по правилу параллелограмма), приложенных в той же точке, что и исходная сила.

5. Аксиома равенства действия и противодействия (3-й закон Ньютона)
Если две взаимодействующие точки принадлежат одному твердому телу, то их силы взаимодействия друг с другом образуют уравновешенную систему сил и, согласно аксиоме 3, могут быть исключены из рассмотрения. Однако, если эти точки принадлежат разным телам, то они не образуют уравновешенной системы. Поэтому исключать такое взаимодействие нельзя.
Аксиома равенства действия и противодействия относится только к материальным точкам. Но в несколько ином виде, она применима и к твердым телам. Взаимодействие тел можно представить как взаимодействие между материальными точками, из которых состоят тела. Тогда все силы, которые действуют на точки тела 2 со стороны точек тела 1, можно привести к равнодействующей , приложенной к некоторому центру O, и паре с моментом . Тогда и все силы, которые действуют на точки тела 1 со стороны точек тела 2,

6. Принцип отвердевания
Если деформируемое тело находится в равновесии, то его равновесие не нарушится, если тело считать абсолютно твердым.
Принцип отвердевания указывает, что если конструкция, состоящая из подвижных частей, находится в равновесии (то есть скорости всех ее точек относительно некоторой инерциальной системы отсчета равны нулю), то уравнения равновесия можно применять ко всей конструкции в целом, считая ее единым твердым телом. Этот принцип является следствием предыдущих аксиом.
4. Связи и их реакции.
Тела, ограничивающие движение несвободных тел, называются связями, а силы, с которыми связи действуют на тело,– реакциями связей. Любое несвободное тело можно условно представить свободным, если мысленно освободить его от связей и заменить их действие реакциями связей.
1. Шарнирно подвижная опора схематично изображается в виде одного стержня с шарнирами на концах и перпендикулярно плоскости качения катков.
Возникает одна вертикальная реакция связи в сторону возможного перемещения: YАYВ (рис.1а)
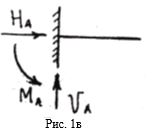
Рис. 1а
2. Шарнирно-неподвижная опора схематично изображается двумя стержнями, шарнирно соединенными на одном конце.
Возникают две взаимно-перпендикулярные реакции связей в сторону возможных перемещений: YА и НА или YВ и НВ, или YC и НС (рис. 1б).

Рис. 1б
3. Жесткая заделка. Связь запрещает любое поступательное движение тела, поэтому возникает 3 реакции связей в сторону возможного перемещения: YА, НА,, МА, т.е. вертикальная реакция связи, горизонтальная реакция связи и реактивный момент (рис. 1в).

Рис. 1в
5. Применение аксиом к решению задач
Наиболее эффективные способы решения задач статики основаны на применении уравнений равновесия. Однако, такие задачи можно решать, применяя только аксиомы. В некоторых случаях это даже является преимуществом, поскольку такое решение является графическим. Далее мы приводим правила, основанные на аксиомах статики, применяемые при решении задач графическим способом.
При графическом решении задач статики, исходную систему сил заменяют эквивалентной, применяя следующие действия.
- К системе сил можно добавить или удалить две силы, равные по абсолютной величине и противоположные по направлению, точки приложения которых совпадают или расположены на линии действия сил.
- Точку приложения любой силы можно перемещать вдоль ее линии действия.
- Две силы, приложенные к одной точке можно заменить силой, равной их векторной сумме, приложенной к той же точке. То есть сложить силы по правилу параллелограмма.
- Любую силу можно разложить на две силы по правилу параллелограмма, приложенных к той же точке, как у исходной силы. То есть можно заменить исходную силу F на векторную сумму



6. Доказательство следствия аксиом 2 и 3
7. Система сходящихся сил. Определение равнодействующей геометрическим способом. Геометрическое условие равновесия.
Основные понятия векторной алгебры
Сложение двух сил. Геометрическую сумму двух сил мы можем определить по правилу параллелограмма (аксиома 4) (рис.2а). При этом угол α между линиями действия сил необходимо как можно точнее отложить по транспортиру, а векторы сил построить строго соблюдая выбранный масштаб. Проще и точнее задача решается вычислением по теореме косинусов.

Рис. 2 а

Вместо параллелограмма сил можно построить треугольник сил (рис.2, б), используя правило:
а) от произвольной точки А откладываем в масштабе вектор ;
б) из конца вектора откладываем вектор ;
в) геометрической суммой двух сил и называется вектор = + , начало которого совпадает с началом вектора , а конец – с концом вектора .
 Рис. 2, б
Рис. 2, б
Сложение системы сил. Геометрическая сумма (главный вектор) любой системы сил (рис. 3, а) определяется или последовательным сложением сил по правилу параллелограмма, или построением силового многоугольника, когда каждый последующий вектор силы откладывается из конца вектора предыдущей силы. Соединив начало вектора с концом вектора , получаем результирующий вектор . (рис. 3,б)
![]()
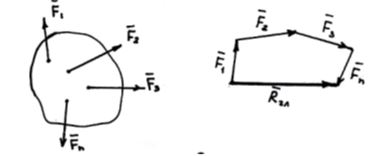
Рис. 3, а Рис. 3, б
8. Пример выполнения практической работы №1
Практическая работа №1
Определение равнодействующей двух сил и системы сил
Цель: формирование умений по определению равнодействующей системы сил.
Ход работы:
- Определите величину и направление двух сил графически и проверьте аналитически (рис.4а).
Графический способ решения (методика решения задач)
- Выберите масштаб сил, например в 1см 3Н (1:3).
- Отложите в масштабе силы F1 и F2, при этом, угол 30˚ отложить с помощью транспортира.
- На силах, как на сторонах, постройте параллелограмм АВСД.
- Проведите диагональ АД, которая и будет являться равнодействующей двух сил F1 и F2 (рис.4, б).
- Измерьте отрезок АД и умножьте на масштаб.
R = 4,8 · 3 = 14,4 н
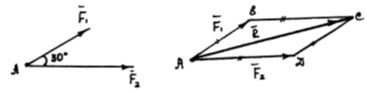
Рис. 4, а Рис. 4,б
F1= 6н
F2= 9н R = 14,4н

ответ: R=14.5H
2. Определите равнодействующую системы сил графически и аналитически (рис. 5а).
Графически (по правилу силового многоугольника)
- Выберите масштаб сил, например, в
- Из произвольной точки А отложите в масштабе вектор ; из конца отложите вектор ; из конца вектора отложите вектор . Построение выполните строго в масштабе, откладывая линии действия сил под заданным углом (рис. 5б).
- Соединив начало вектора и конец вектора , получите вектор равнодействующей R.
- Измерьте величину вектора R и умножьте на масштаб.
- F1= 4н; F2 = 6н; F = 3н.

Рис. 5(а) Рис. 5(б)
R = 5,1∙2 = 10,2н
Аналитически (по правилу проекций) рис.5(в)
- Проведите ось х через одну из заданных сил (например, через силу F1), ось у – под углом 90° к оси х.
- Проставьте углы между осями х и у и силами F2 и F3.
- Спроецируйте силы F1; F2; F3 на оси х и у.
- Определите сумму проекций сил на оси х и у: RХ и RУ-
- Получив две проекции сил: RХ и RУ, определите их равнодействующую. Соединив конец вектора RХ и конца вектора RХ, получите общую равнодействующую RГЛ.– главный вектор (рис. 5г).
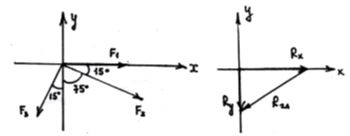
Рис. 5в Рис. 5г
6. Из силового треугольника АВС определите гипотенузу ВС = RГЛ по теореме Пифагора.
RГЛ = , где RХ= = F1+ F2 · cos15°–F3 · cos75˚ = 4 + 6 ∙ 0,906 – 3 ∙ 0,259 = 9,019н;
RУ = -F2∙cos75˚– F3∙cos 15° = -6 0,259 – 3 ∙ 0,966 = -4,452н
RГЛ = = 10,1н
Ответ: R = 10,1н.
Варианты заданий к практической работе №1 даны в приложении №1. Выполните свой вариант задания.